Matrix Decompositions
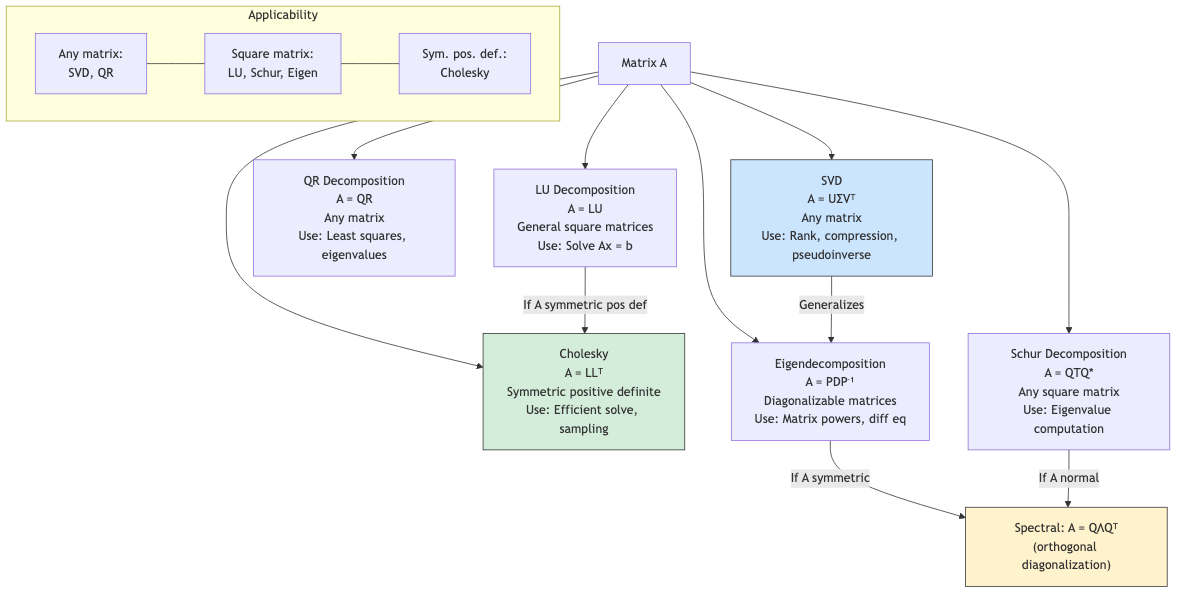
Matrix decompositions (factorizations) express a matrix as a product of simpler matrices. They are the computational backbone of numerical linear algebra — solving systems, computing eigenvalues, least squares, and compression.
LU Decomposition
Factor A into a lower triangular L and upper triangular U:
A = LU
L has 1s on the diagonal (unit lower triangular). U is the row echelon form.
With Partial Pivoting
In practice, row swaps are needed for numerical stability:
PA = LU
where P is a permutation matrix.
Algorithm
Gaussian elimination records multipliers in L:
For k = 1 to n-1:
For i = k+1 to n:
L[i][k] = A[i][k] / A[k][k]
For j = k to n:
A[i][j] -= L[i][k] * A[k][j]
U = resulting upper triangular
Time: O(2n³/3).
Solving Ax = b with LU
- Factor A = LU (once): O(n³).
- Solve Ly = b by forward substitution: O(n²).
- Solve Ux = y by back substitution: O(n²).
For multiple right-hand sides, LU is much more efficient than re-doing Gaussian elimination.
LDU Decomposition
Separate the diagonal: A = LDU where L is unit lower triangular, D is diagonal, U is unit upper triangular.
Cholesky Decomposition
For symmetric positive definite (SPD) matrices:
A = LLᵀ
where L is lower triangular with positive diagonal entries. Unique.
Algorithm:
For j = 1 to n:
L[j][j] = √(A[j][j] - Σₖ₌₁ʲ⁻¹ L[j][k]²)
For i = j+1 to n:
L[i][j] = (A[i][j] - Σₖ₌₁ʲ⁻¹ L[i][k]·L[j][k]) / L[j][j]
Time: O(n³/3) — half the cost of LU.
Applications: Solving SPD systems (covariance matrices, kernel matrices), sampling from multivariate Gaussians, computing determinants (det(A) = (Π L[i][i])²).
Existence: A = LLᵀ exists iff A is symmetric positive definite. If A[j][j] - Σ L[j][k]² ≤ 0 during computation, A is not SPD.
QR Decomposition
Factor A into an orthogonal Q and upper triangular R:
A = QR
Covered in the inner product spaces file. Three methods:
- Gram-Schmidt: Conceptually simple, numerically unstable.
- Householder reflections: Numerically stable, most common.
- Givens rotations: For sparse matrices.
Singular Value Decomposition (SVD)
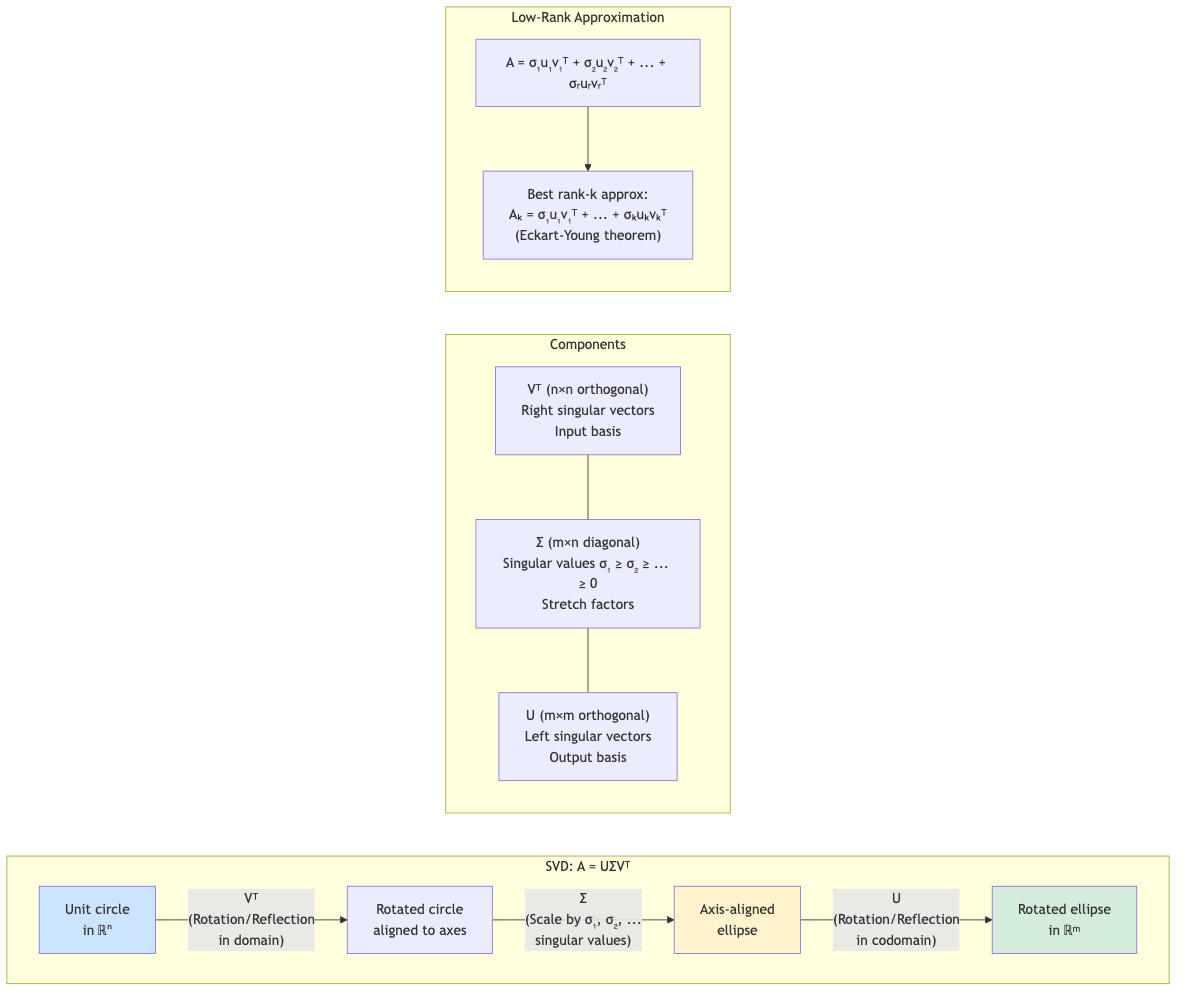
The most important matrix decomposition. Every m × n matrix A (real or complex) can be factored as:
A = UΣVᵀ
where:
- U ∈ ℝᵐˣᵐ is orthogonal (left singular vectors)
- Σ ∈ ℝᵐˣⁿ is diagonal with non-negative entries σ₁ ≥ σ₂ ≥ ... ≥ σᵣ > 0 (singular values)
- V ∈ ℝⁿˣⁿ is orthogonal (right singular vectors)
- r = rank(A)
Relationship to Eigenvalues
- σᵢ² are the eigenvalues of AᵀA (and AAᵀ).
- Columns of V are eigenvectors of AᵀA.
- Columns of U are eigenvectors of AAᵀ.
- σᵢ = √λᵢ (singular values are square roots of eigenvalues of AᵀA).
Compact SVD
Only keep the r non-zero singular values:
A = U_r Σ_r V_r^T
where U_r is m × r, Σ_r is r × r, V_r is n × r.
Truncated SVD (Low-Rank Approximation)
Keep only the k largest singular values (k < r):
A_k = U_k Σ_k V_k^T
Eckart-Young-Mirsky Theorem: A_k is the best rank-k approximation to A in both Frobenius and spectral norms:
‖A - A_k‖_F = √(σ_{k+1}² + ... + σ_r²)
‖A - A_k‖₂ = σ_{k+1}
No other rank-k matrix is closer. This is the theoretical foundation of PCA, dimensionality reduction, and data compression.
SVD Properties
- rank(A) = number of non-zero singular values
- ‖A‖₂ = σ₁ (largest singular value = spectral norm)
- ‖A‖_F = √(Σ σᵢ²) (Frobenius norm)
- Condition number: κ(A) = σ₁/σᵣ (measures numerical sensitivity)
- Pseudoinverse: A⁺ = VΣ⁺Uᵀ where Σ⁺ inverts the non-zero singular values
Computing SVD
- Reduce to bidiagonal form via Householder reflections: O(mn²).
- Apply iterative methods (Golub-Kahan, divide-and-conquer) to the bidiagonal matrix.
- Total: O(mn²) for an m × n matrix (m ≥ n).
For large sparse matrices, compute only the top k singular values: randomized SVD, Lanczos/Arnoldi.
Polar Decomposition
Every matrix A can be written as:
A = UP
where U is orthogonal (or unitary) and P is symmetric positive semidefinite.
- P = √(AᵀA) (the "stretch" part)
- U = AP⁻¹ (the "rotation" part, if A is invertible)
This separates rotation from stretching, analogous to polar form of complex numbers.
Schur Decomposition
Every square matrix A can be factored as:
A = QTQ*
where Q is unitary and T is upper triangular. The diagonal of T contains the eigenvalues.
For real matrices with only real eigenvalues, Q can be real orthogonal and T real upper triangular.
For real matrices with complex eigenvalues, the real Schur form uses 2×2 blocks on the diagonal for complex conjugate eigenvalue pairs.
The QR algorithm converges to the Schur form.
Jordan Normal Form
Every matrix A over ℂ is similar to a Jordan normal form J:
A = PJP⁻¹
where J is block-diagonal with Jordan blocks:
Jₖ(λ) = [λ 1 0 ... 0]
[0 λ 1 ... 0]
[0 0 λ ... 0]
[⋮ ⋮ ⋮ ⋱ 1]
[0 0 0 ... λ]
Each Jordan block has eigenvalue λ on the diagonal and 1s on the superdiagonal.
When Jordan Form = Diagonal
If all Jordan blocks are 1×1, J is diagonal. This happens iff A is diagonalizable (geometric multiplicity = algebraic multiplicity for all eigenvalues).
Practical Notes
Jordan form is numerically unstable — small perturbations can change the Jordan structure. In practice, Schur form is preferred for computation.
Jordan form is primarily a theoretical tool: understanding matrix powers, exponentials, and canonical structure.
Matrix Exponential
e^{tJ_k(λ)} = e^{tλ} [1 t t²/2 ... t^(k-1)/(k-1)!]
[0 1 t ... t^(k-2)/(k-2)!]
[⋮ ⋮ ⋮ ⋱ ⋮ ]
[0 0 0 ... 1 ]
So e^{tA} = P e^{tJ} P⁻¹. Used in solving systems of differential equations x' = Ax.
Summary of Decompositions
| Decomposition | Form | Requirements | Cost | Primary Use |
|---|---|---|---|---|
| LU | A = LU | Square (with pivoting: any) | O(n³) | Solve Ax = b |
| Cholesky | A = LLᵀ | SPD | O(n³/3) | SPD systems, sampling |
| QR | A = QR | Any (m ≥ n) | O(mn²) | Least squares, eigenvalues |
| Eigendecomposition | A = PDP⁻¹ | Square, diagonalizable | O(n³) | Spectral analysis |
| SVD | A = UΣVᵀ | Any | O(mn²) | Low-rank approx, pseudoinverse |
| Schur | A = QTQ* | Square | O(n³) | Eigenvalues (stable) |
| Jordan | A = PJP⁻¹ | Square (over ℂ) | Unstable | Theoretical |
| Polar | A = UP | Any | O(n³) | Rotation extraction |
Real-World Applications
- LU: Solving large linear systems in circuit simulation, structural analysis, fluid dynamics.
- Cholesky: Gaussian process regression, portfolio optimization, Kalman filters.
- QR: Least squares regression, QR algorithm for eigenvalues, signal processing.
- SVD: Image compression (keep top-k singular values), recommendation systems (matrix completion), latent semantic analysis, noise reduction, pseudoinverse for ill-conditioned systems.
- PCA: SVD of centered data gives principal components.
- Matrix exponential: Solving ODEs, Markov chain analysis, quantum mechanics (time evolution).